
MIT Cheetah Robot Runs Fast and Efficiently The Cheetah robot developed at MIT s Biomimetic Robotics Lab first grabbed our attention when the project was announced back in 2009 In the years that followed few details emerged about its progress until finally in July 2012 the lab posted videos of the robot walking on YouTube Now at the IEEE International Conference on Robotics and Automation ICRA the MIT team has shown its cheetah inspired robot running at a respectable 22 km h 13 7 mph And more the robot has an energy efficiency that rivals that of real running animals That speed makes it the second fastest legged robot in the world beaten only by Boston Dynamics Cheetah which can run twice as fast The MIT Cheetah knocks the Planar Biped developed at the MIT Leg Lab in 1989 which achieved 21 km h 13 mph down to third place It s worth noting that both the MIT Cheetah and Boston Dynamics Cheetah are attached to horizontal bars that constrain them along the sagittal plane preventing roll and yaw movement So yeah you might say that is cheeting but hopefully we ll see these robots running free sometime in the future Watch it running
MIT Cheetah Robot Runs Fast, and Efficiently
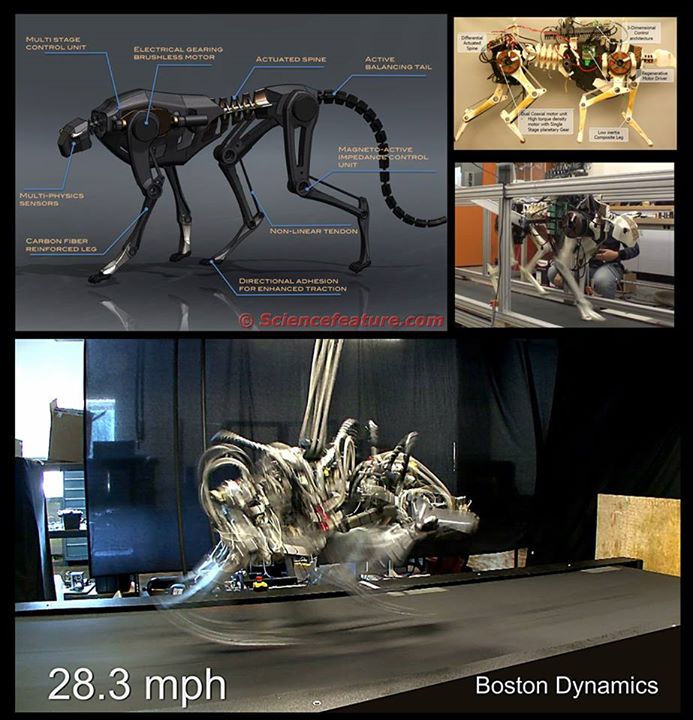
The Cheetah robot developed at MIT's Biomimetic Robotics Lab first grabbed our attention when the project was announced back in 2009. In the years that followed few details emerged about its progress, until finally in July 2012 the lab posted videos of the robot walking on YouTube. Now, at the IEEE International Conference on Robotics and Automation (ICRA), the MIT team has shown its cheetah-inspired robot running at a respectable 22 km/h (13.7 mph). And more: the robot has an energy efficiency that rivals that of real running animals.
That speed makes it the second fastest legged robot in the world, beaten only by Boston Dynamics' Cheetah (which can run twice as fast). The MIT Cheetah knocks the Planar Biped, developed at the MIT Leg Lab in 1989, which achieved 21 km/h (13 mph) down to third place. It's worth noting that both the MIT Cheetah and Boston Dynamics' Cheetah are attached to horizontal bars that constrain them along the sagittal plane (preventing roll and yaw movement). So, yeah, you might say that is cheeting, but hopefully we'll see these robots running free sometime in the future.
Watch it running : http://www.youtube.com/watch?feature=player_embedded&v=UBHJqnM8RTU

Related Posts

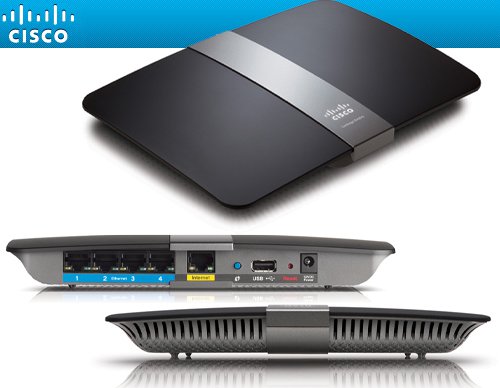
If you are planning to get your office/home environment Wireless with the updated technology and the best possible speed, CompuBrain recommends you buy Linksys E4200 (approx INR 9000), it comes with 3 bands of signal(1 band @ 5 ghz for all your latest laptops/netbooks/tablets/cell phones, 1 band @ 2.4 ghz for all devices made earlier than Dec' 10 and 1 band dedicated for your guest with a facility to restrict the bandwidth for your guest)
The best part is that it comes with a USB port to plug your pendrive or an external harddrive to share it with all those devices coming in the network.
All these with the highest level of security that you would desire to protect your wireless environment.


Huge Rock Crashes Into Moon, Sparks Giant Explosion NASA astronomers have been monitoring the moon for lunar meteor impacts for the past eight..